ժҪ:�������V�����Ĕ���ʽ�u������Ӌ�ڑ�����푑��ٶȱ��^��������С������С�ڏ��r����Ӌݔ�����Ӄɂ����}�M������������������O���T��ֵ�ķ��������ϵ�y푑��ٶȡ����l�V�����Y���M�ж�Ξ�0�Д�,��Q��ϵ�yݔ�����m���}��ͨ�^���l�V�����Y������,��ƽ���rȥ�����^�˜ʲ���l��ֵ,��ȥ�����ֵ����Сֵ,��ƽ���Y���M�еڶ���ƽ���ķ����pС��ϵ�yݔ���IJ���,���������Ӌݔ�������ԡ�
0����
�����u������Ӌ���Пo�ɄӲ����S�o���㡢�����pʧС��ݔ���l�����ȃ��c,���Ԝy��Һ�w�����w����������,�����ஔ�V����Ŀǰ���u������Ӌ��Ҫ�ЃɷN̎����ʽ,���}�_����Ӌ����ʽ�͔�����̖̎����ʽ������,������̖̎����ʽ���п��ɔ_�����������̱��^���;��ȸߵă��c�������V�����Ĝu������Ӌ������̖̎������,����DSP(������̖̎����)оƬ�����ˌ��r̎��ϵ�y,ͨ�^�˶��������ڹ��I�F��,ȡ���˺ܺõ�Ч�����ڑ����У�ᘌ�����ʽ�u������Ӌ푑��ٶ����Լ���С��������С�ڏ��rݔ����̖���ӆ��}���M�������˵ķ���,���������Ч�Ľ�Q������
1�����̖푑����ٶ�
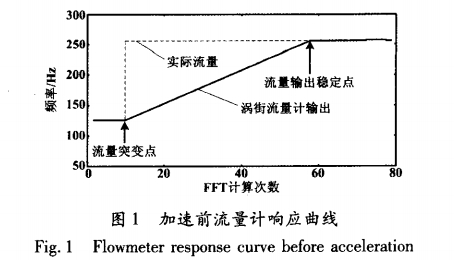
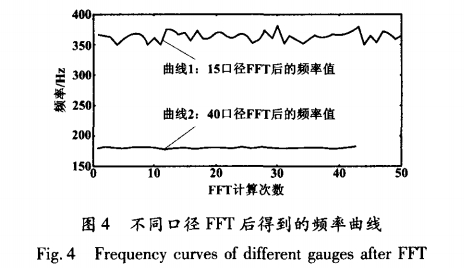
���������l�V��Ӌ���������u����̖���l���ǻ��ڜu������Ӌ��̖��һ��ƽ���S�C�^����̖,���������ڶ̕r�g���Ƿ����Ļ�׃����С�����ڜu������Ӌݔ����̖���r�Ե�Ҫ��,ֻ�܌������L�r�g�ȵ���̖�M.��̎��,��ֻ�ܽ�ȡһ�Δ����M���l�V���������˷�ֹ�����yӋ׃���Ԍ�Ӌ��u���l�ʵ�Ӱ�,��회����ɴ��l�V�����ĽY���M��ƽ��,�@����Ҫ���M�r�g����ƽ���Δ����r�����֜u������Ӌ��푑��ٶȾ͕��@�ñ��^��������,�҂���ϵ�y���Õr��l�ʞ�40MHz��TMS320LF2407ADSPоƬ��ʹ�ÅR���Z�Ծ���FFT����Ӌ��u����̖���l�V,��50��Ӌ��Y���M��ƽ����ÿ��FFTӋ��r�g�����300ms(������̖̎��,�˙C�ӿڵȌ���������ܛ�����Еr�g),���Õr��Ş�15s,�@���r�g���^�L�������@�Εr�g��,�����l��ͻȻ׃����ϵ�y����ҪӋ��50��FFT,���ܷ�ӳ������׃��,�@����ɜy���`��,��D1��ʾ��
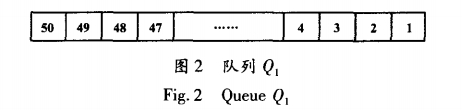
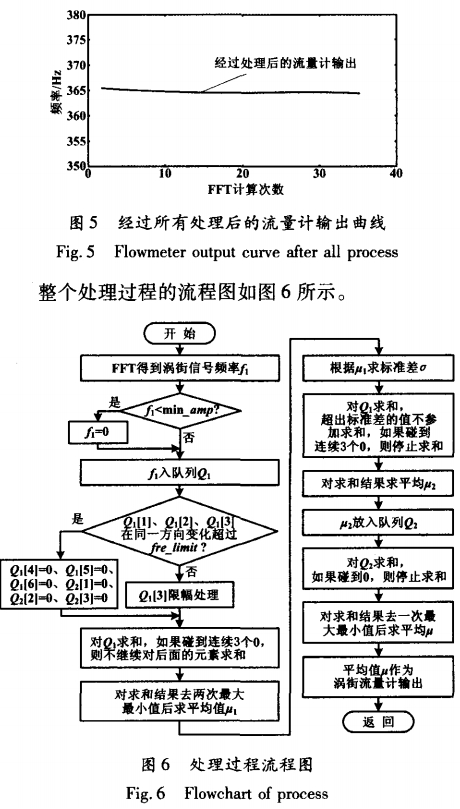
�����ڌ��H̎����,��ÿ���l�V������õ��Ĝu���l�ʷ���һ��ѭ�h�����,ԓ��зQ�����Q1,��D2��ʾ(���ֱ�ʾ��гɆT��̖)������,����߅�Ğ����Q1,����߅�Ğ��βQ1���ٰ����M�ȳ���ԭ�t����������µ����ɂ�ֵ�M��ƽ��,�õ��u��ݔ���l�ʡ����ڌ�����е�ֵ�����Д��ֱ�Ӆ��cƽ.��,����ϵ�y푑��ٶ�׃����
�������,ͨ�^�O���T��ֵ�ķ�������Q�@�����}���������Q1�б�����^ȥ��������Ϣ���O��һ���l��ͻ׃�T��frelimit,����B�mӋ���N���l��ֵQ1[N]~Q1[1]�����^��fre._limit,�t���@N���l��ֵ�ͺ����M����е�ֵ�M��ƽ��,��ǰ���ֵQ1[N+1]~Q1[50]������ƽ��,Nһ���3~5����Փ�ϣ��T��fre_limit���x��ԽС��Сͻ׃��Խ���С�����,����FFTӋ��������l�ʕ���--�������Ȳ���,����,�T��ֵ�����x��̫С�����⣬����С��ͻ׃��ɵ��`���̫��,����Ҳ�]��Ҫ���T���O�õú�С��
����һ����f���u������Ӌ��С�����r(���l̎)�l��Ӌ��Y�����ӱ��^��,���������r(���l̎)���^����������,�T��ֵ���Ը����u������Ӌ���ܜy������l�ʁ��O�á���������Ӌ����߿ɜy�l������֪��,���ɘ��l��һ���O���Դ�������l�ʵ�2��,����,�T��ֵ���Ը���ʽ(1)��Ӌ��:

����ʽ��:ƒs��ɘ��l��;Ɩ��x�����̱�;��(0<l��l<1)��ϵ�����{���������{���T��ֵ��С,��<0�r������;��>0�r�����ޡ�һ�����ȡ±4%~±13%��
����������ͻ׃�����^�T�ޕr,������Ӌ�{���r�g���۷e��������������`���:
����ʽ��:n(n��1)��ƽ���Δ�;ƒp��ͻ׃��ǰ���l��;ƒr��ͻ׃�Ժ���l�ʡ���������ͻ׃���^fre_limit�r,�`����dz�С��
�������H����׃����һ���B�m׃�����^�̡�����,ֻҪ������������̖�l�ʵ�׃���ʳ��^fre_limit/tc,����tc��FFTӋ����g���r�g���tϵ�y���ܿ���푑�;��������������̖�l�ʵ�׃����С��fre_limit/tc.�r,����������`��С��ʽ(2)��Ӌ��ֵ��
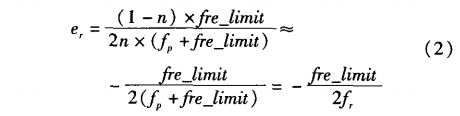
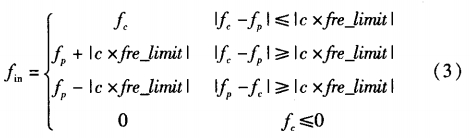
�����D3�齛�^����̎����40�ڏ��u������Ӌ������ͻ׃�r��푑���������Ҋ,������ͻ׃��,ϵ�y���^3��FFTӋ����ܸ���������׃��,��Ч�����������Ӌ��푑��ٶȡ�
2.1����ݔ����̖�Ĕ��m�F��
�����l�V�������ǰ��������ԭ�t,����FFTӋ������Ĺ����V�����������l��ֵ����u���l�ʡ�����,���ڸɔ_�Ĵ���,���ò��O��һ����С��ֹ��ֵ(min_amp)������С��ֵ�ɔ_��̖,����FFTӋ���ֵ������С��ֹ��ֵ�r,����Ӌݔ����0,�Ķ���߿��ɔ_����;��������̖�|�������ɘ���̖�Ӵ�FFT�������ڲɘӵ�ԭ��,����FFTӋ���ֵ���в��ӡ�������������Ӌ�������r,�����FFFTӋ���ֵ������С��ֹ��ֵ����r,�@����������Ӌݔ�����F���m�F��
��������Ӌ���m���}��Ҫ������ż���״ε�FFTӋ���ֵ������С��ֹ��ֵ���¡�ͨ�^���l�F��������Ӌ�ɜy����������-�㲻�����F�B�m�״�FFTӋ���ֵ��С����С��ֹ��ֵ����r������������FFTӋ���ֵ������С��ֹ��ֵ�r����ֱ��ݔ��0,���nj�0�������Q1����Ӌ��ƽ���l����ǰ�Ȍ����Q1�������N(N��ȡ3~4)��ֵ�M���Д�,���N��ֵ��ȫ����0,�t����Ӌݔ����0,��t�^�m��ƽ��Ӌ��,��ƽ��ֵ��������Ӌ��ݔ���l��,�@�ӾͿ��Խ�Qݔ�����m�Ć��}��
2.2��Qݔ����̖�IJ��ӆ��}
������С�����ĕr��u������Ӌ��̖��,����Ƚ���,��̖�|�����^��,�l�V�����õ��Ĝu���l�ʲ��ӱ��^���e��С�ڏ��u������Ӌ�����ڂ��������b��ԭ��,�@�N�F��������@���D4��,����1��15�ڏ��u������Ӌ�������l�ʸ���,ÿ��FFTӋ��õ��Ĝu���l��;����2��40�ڏ��x�����l�ʱ��^�h�rÿ��FFTӋ���õ��Ĝu���l�ʡ���Ҋ������1�����^��ֵ�s��30Hz���˕r,�����ȡƽ����ʩ,Ҳ�o��ʹݔ���l��ֵ������
�������ӆ��}��Ҫ��������̖�^��,ÿ��FFTӋ������l��ֵƫ��̫������ɵġ�����,���ȱ�횱��C���Q1�е������l��ֵ�ڿ��ŷ�����,���������]��ͻ׃����r��,���Q1�е��l��ֵ�����cǰ��ݔ���l�ʲ��̫�ࡣ��ˣ������O��һ���l�����S���ӷ�������ֵ����Ӌ����l��ֵ���������r,���Ǻ��ε،��@��ֵȥ��,���������һ�ε�ݔ���l�ʼ�����ֵ�������@��ֵ���@��ij�N�̶����ܱ�����ӳ����׃��څ�ݵIJ�����Ϣ��ͨ�^���l�F,���Ը���fre__limit���O���@����ֵ��
̎�����ӆ��}�ľ��w���E��:
�ٌ����Q,�ĵ�N��Ԫ��Q1[N]��ʽ(3)̎��,�õ���ֵƒin��:
����ʽ��:ƒin��̎�������Q1[N]�е��l��ֵ;f����̎��ǰ���Q1N]�е��l��ֵ,��ԭ��FFTӋ��������l��ֵ;f,������Ӌ���--��ݔ�����l��ֵ;c�鳣��,���Ը������H��r�xȡ,�����ȡ1����Ҫע�����,�@���nj�Q1[N]̎��,�����nj����Ԫ��Q1[1]̎����ԭ����,Q1[1]~Q1[N-1]�е���Ϣ����ӳ������ͻ׃,��������M����̎��,��Ӱ�ϵ�y��푑��ٶȡ�
�ڌ����Q1�е�ֵ�M��ȥN-1�������Сֵ̎��,�����ֵμ,������ֵ����˜ʲ�σ,Ȼ��,�����ؘʲ���Q1�е�ֵ�M��ƽ�����������˜ʲ�Ĕ���������ƽ����
�۽��^����̎����õ����l���ѽ����^����,������һ�������IJ��ӡ���������Ƿ�����Ԓ,����Ӌݔ����ԓ�ӽ�����,���ӱ��^С�����,���Կ��]��Ӌ���l��ֵ�M�еڶ���ƽ��,�ஔ���M�ж��ΞV�������,������һ�����Q2�����Q2�е�Ԫ�������Q;���^�������E̎����ĽY��;�ٌ����Q2�M��ƽ��Ӌ��,�õ��ľ�ֵ��������Ӌ��ݔ����ע��,�@����Q2ҲҪ�M�м���̎��,�����c̎��Q1����ơ��D5��ʾ�齛�^̎���Ժ�u������Ӌ��ݔ�����ĈD�п��Կ�������Ӌݔ���ѽ����^ƽ����
3�Y���Z
���������l�V������ĽY��,�����O���T��ֵ�ķ���������Ӌݔ���M�м���̎��,�������˼���̎���������`��,��Ч�����������Ӌ��푑��ٶȽ������{���r�g������푑�����ɵ��`�
�������l�V������ĽY���M��0ֵ�Д�,�B�m�״Ξ�0,����Ӌݔ���Ş�0,����������Ӌ�ڿɜy��������.�rݔ�����m�F��
�����ڌ��l�V������ĽY��ƽ��ǰ��ȡ������ȥ�����^�˜ʲ������ֵ��ȥ�����ֵ��Сֵ�IJ���,����ƽ����ĽY���M�еڶ���ƽ��,�pС������Ӌݔ����̖�IJ���,���������Ӌݔ���ķ����ԡ�
����Դ�ھW�j,�����֙�ϵ���h����